Schüler*innen Ingenieur*innen Akademie (SIA)
Der Seminarkurs Schüler:innen-Ingenieur:innen-Akademie ist eine großes Projekt, der bei der Koordination und Finanzierung von der BBQ Beruflichen Bildung gGmbH und vom Arbeitgeberverband Südwestmetall unterstützt wird. Dieses Projekt ermöglicht den Schülerinnen und Schülern, trotz des sprachlichen Profils im Bereich der Naturwissenschaften bestens ausgebildet zu werden.
Die erfolgreichen Bewerberinnen und Bewerber werden:
- Mit Legorobotern gegen Studenten bei Roborace antreten,
- Einem Porsche unter die Haube schauen,
- Mit Ingenieur:innen über ihren Beruf sprechen,
- Bei der DHBW die Vorzüge eines dualen Studienganges zu erfahren,
- An der Uni Vorlesungen über Energieumwandlung hören,
Hierbei erwerben sie die folgenden Soft skills:
- Problemlösestrategien
- Teamfähigkeit und
- Präsentationkompetenzen
Der Seminarkurs für die K1 findet mittwochs von 14-17 Uhr in 105 statt.
Schüler:innen aus der 10. Klasse können bis 30.3. bei mir ihre Bewerbung abgeben. Die Auswahl wird Ende Juni getroffen.
Axel Nothardt
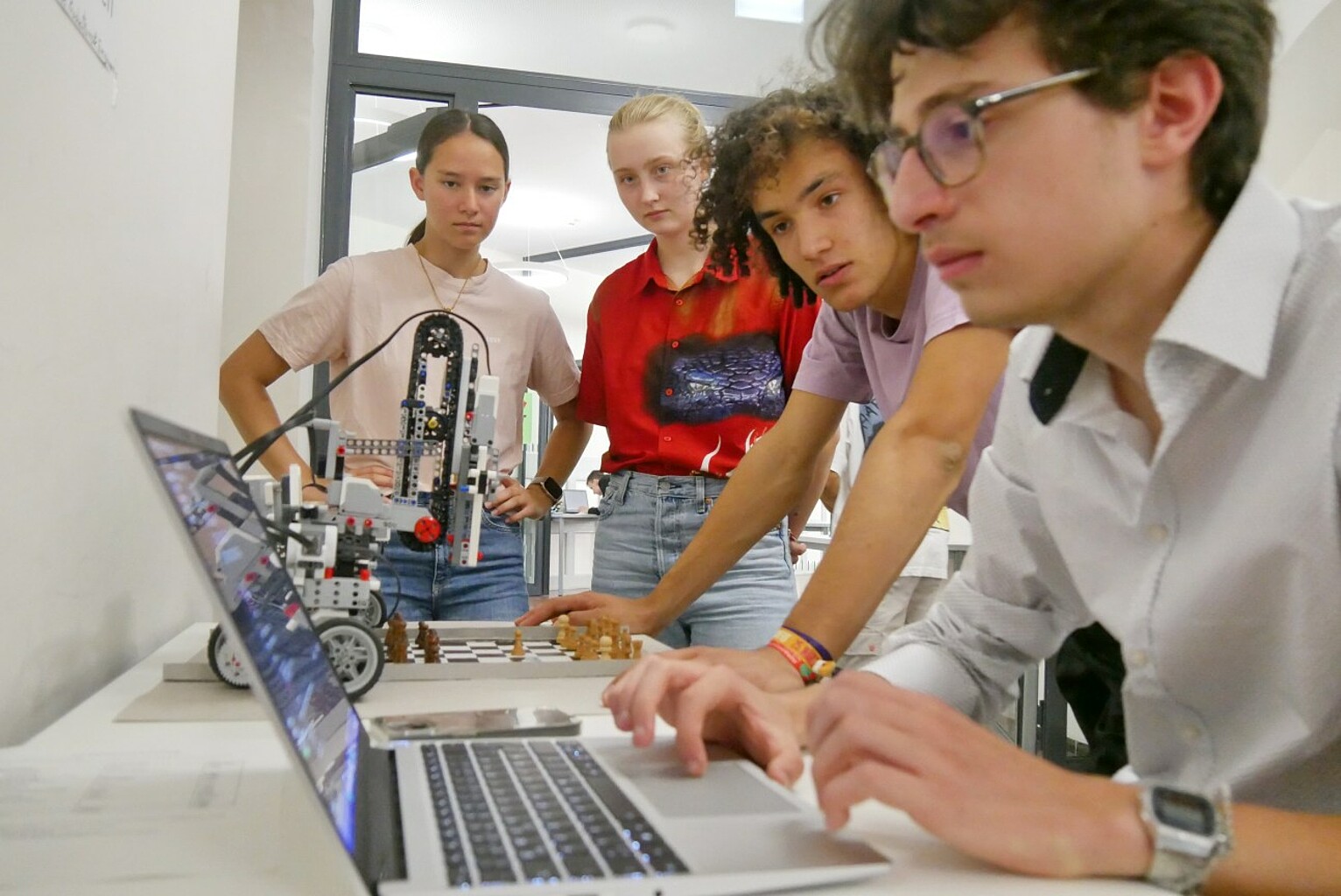
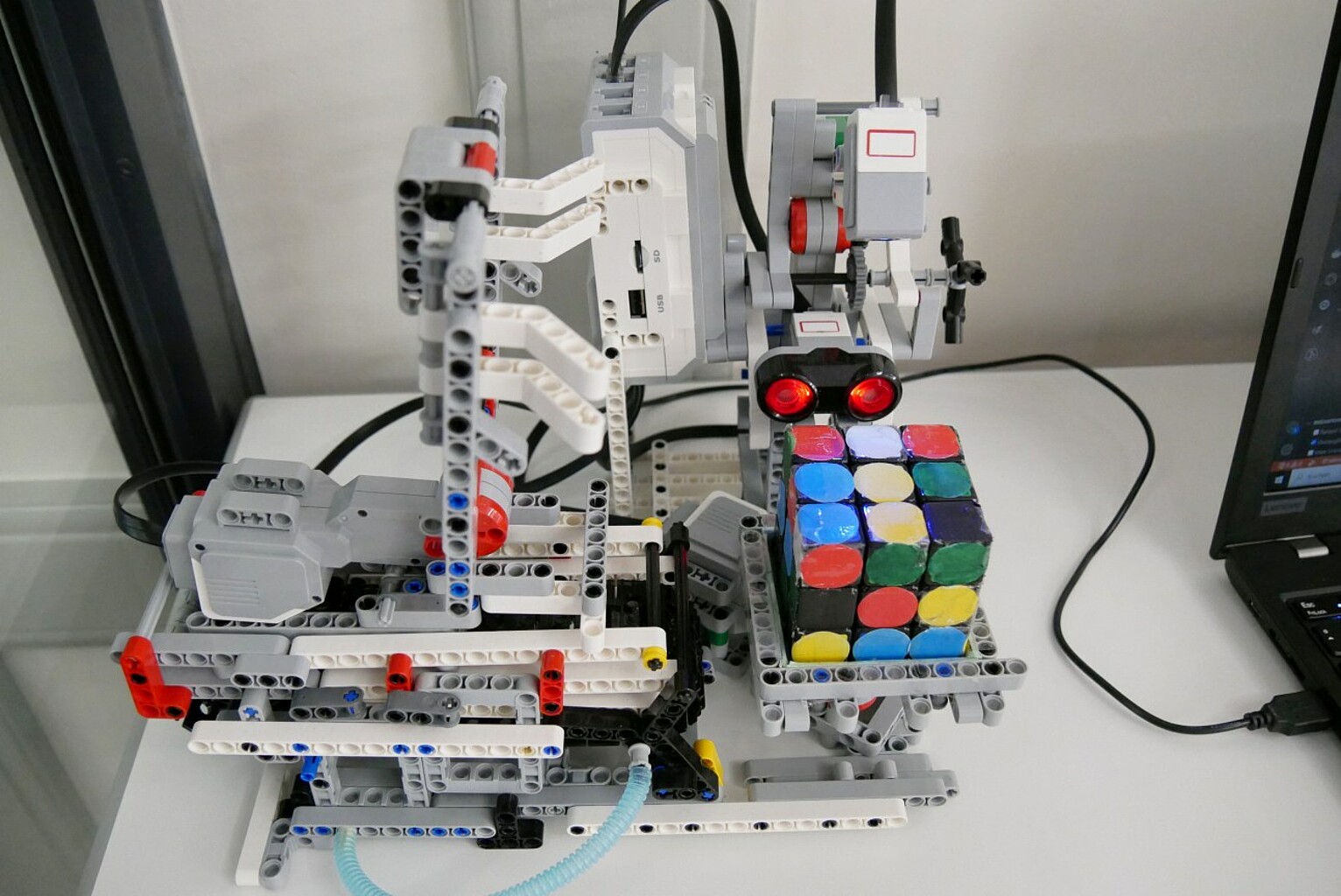
SIA-Abschlussveranstaltung
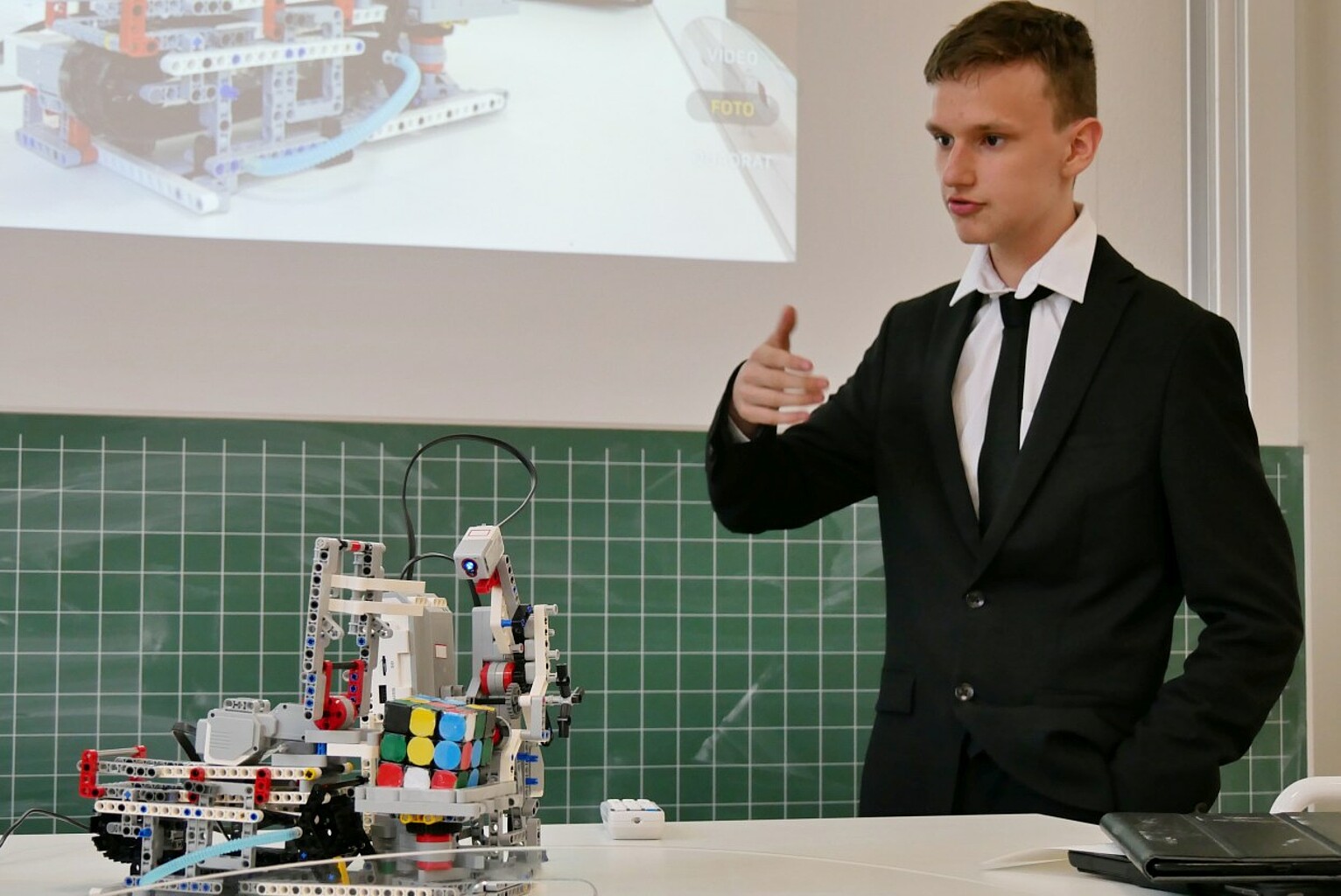
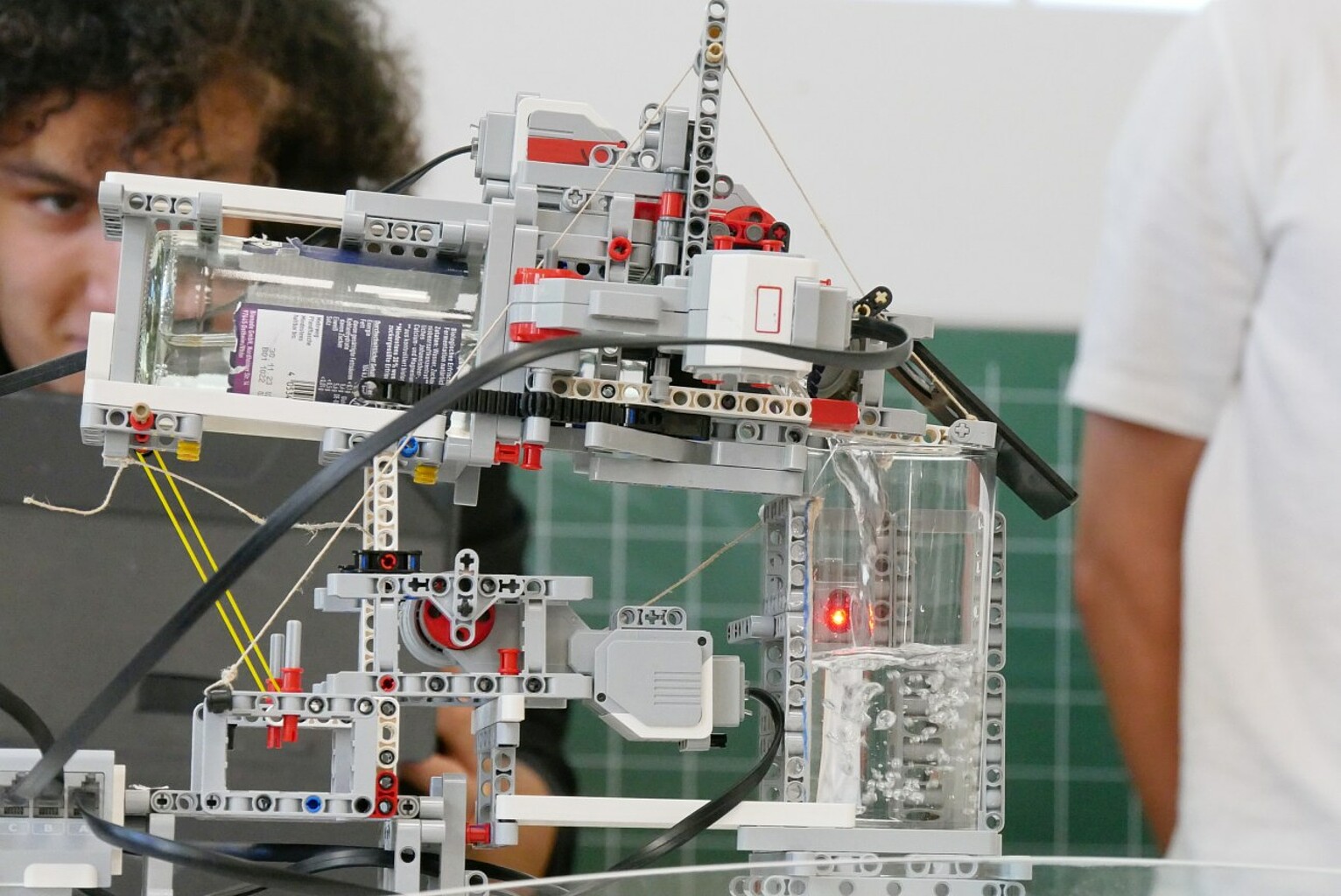
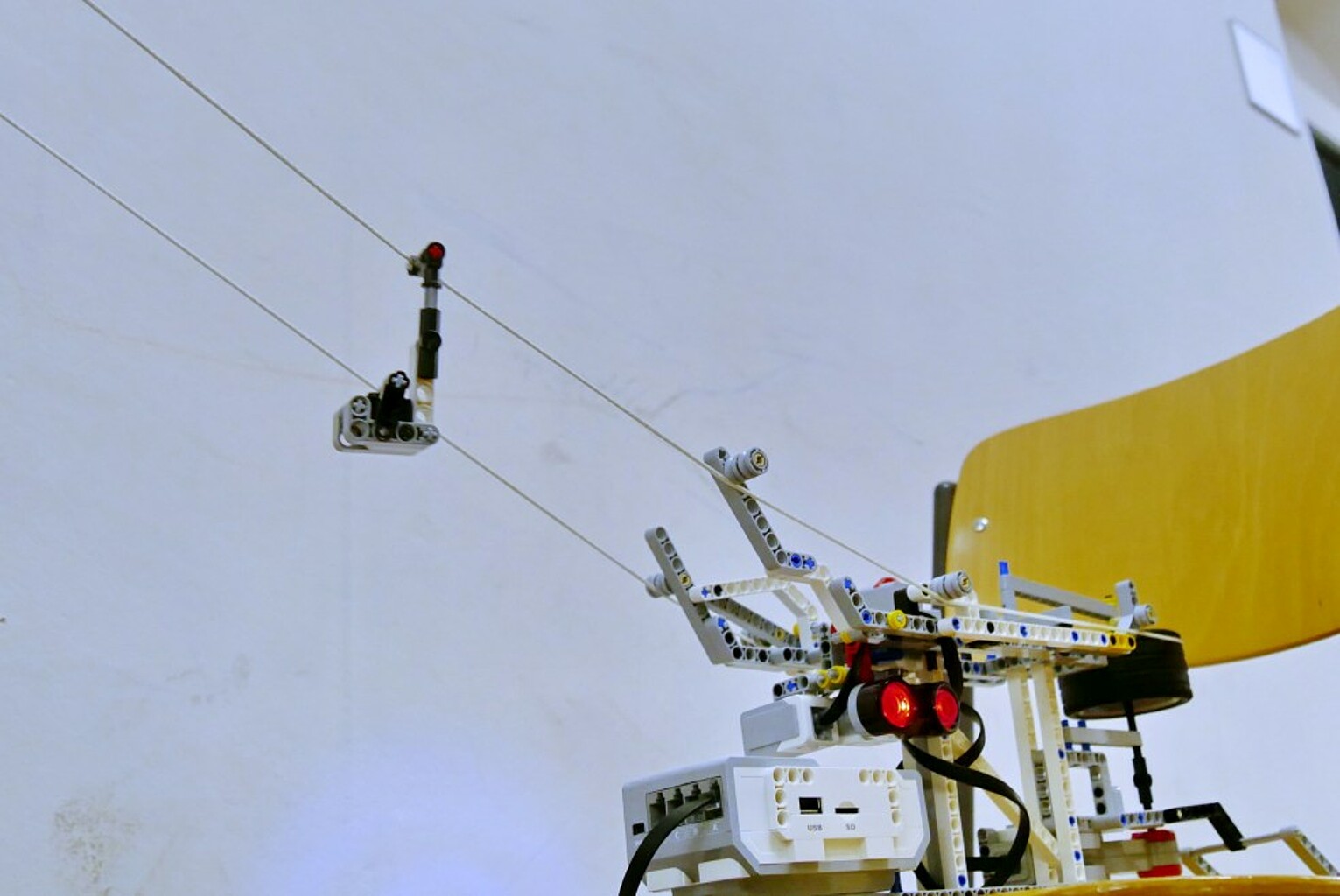
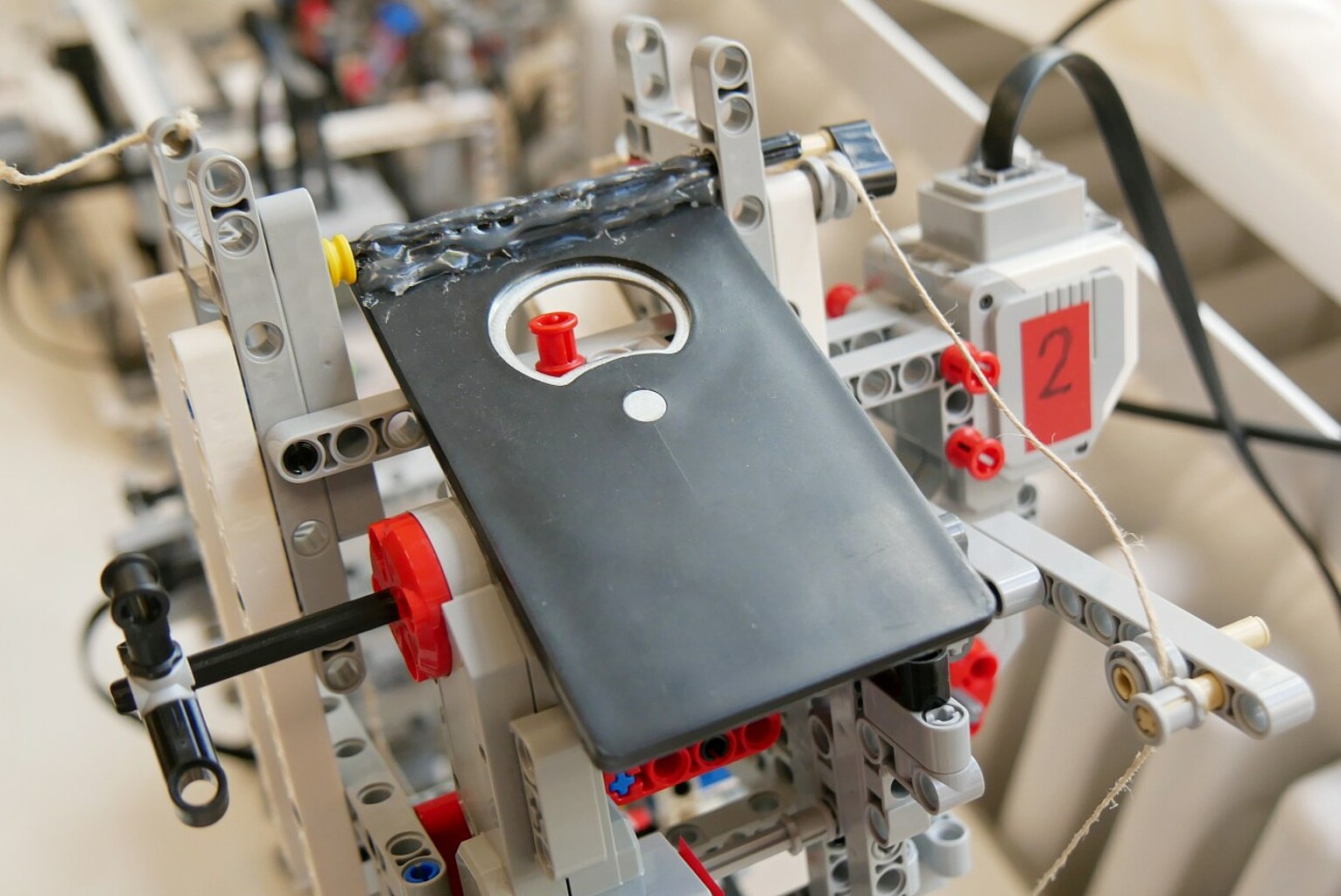
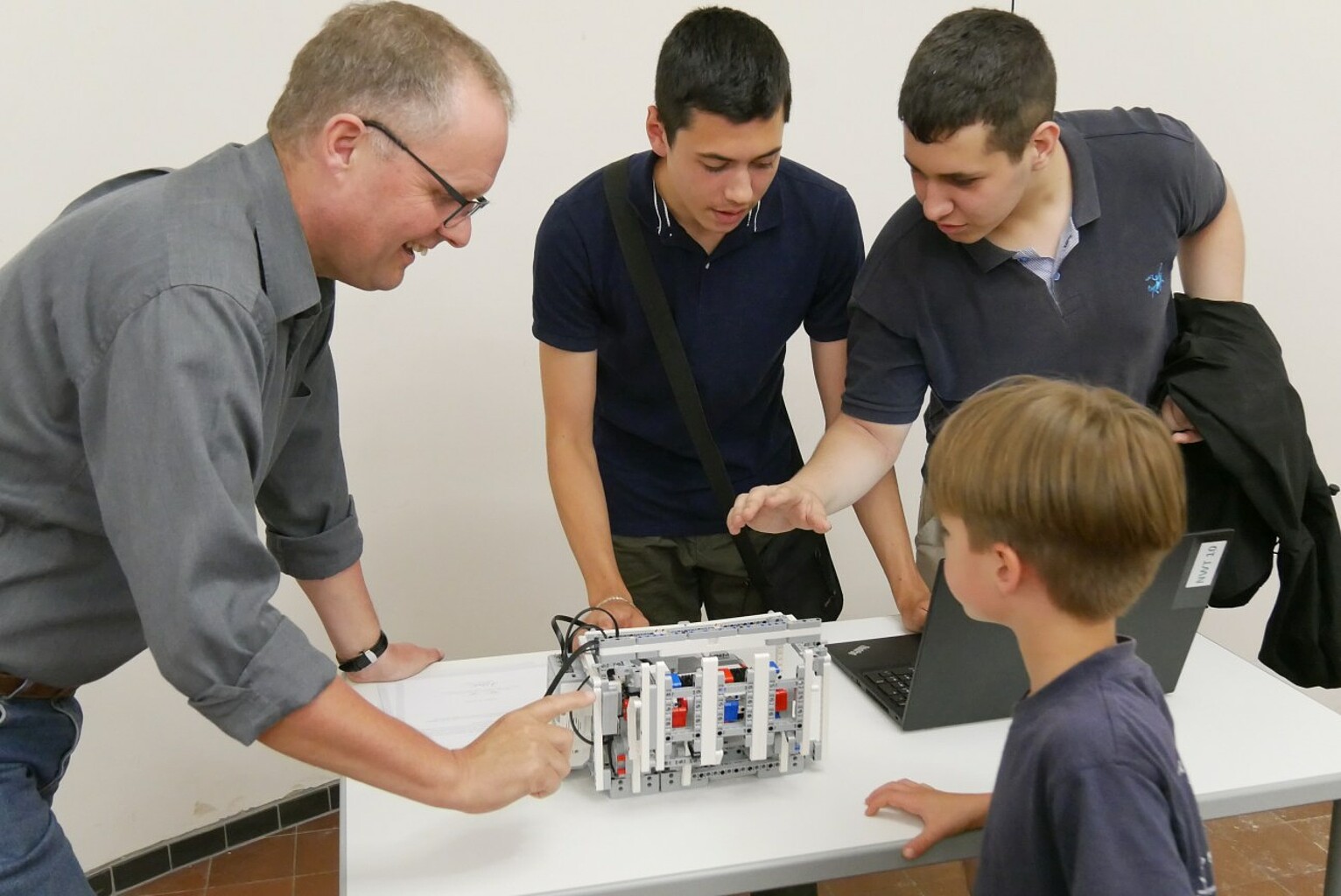
Am Mittwoch 5.7. füllte sich um 17 Uhr der Saal. Die 14 SIA Schüler*innen hatten ihre Lego-Mindstorm-Roboter schon in Position gebracht. Kurz stellten sie vor, dass sie dieses Jahr die Photogrammetrie, Roborace und das DLR an der Uni und die DHBW in ihren neuen Räumlichkeiten besucht hatten. Dann wurden die Roboter in Betrieb genommen. Der Cubic Champion Roboter konnte einen Rubik-Würfel lösen. Ihm wurde ein beliebig verdrehter Würfel in die Finger gegeben und er scannte zunächst die Felder nacheinander ein, berechnete den nötigen Algorithmus und legte dann los. Im Film verfolgten wir im Zeitraffer, wie der Würfel gelöst wurde. Bei „Lego Carlsen“ wurde ein Schachzug in den Computer eingegeben, der Roboter führte den Zug auf dem Schachbrett aus, übergab die Daten an eine Schach KI, die den optimalen Zug für die andere Farbe berechnete und abermals zog der Roboter die entsprechende Figur. Ein Skilift, ein Linienfolger für Snacks und ein Glückspielautomat standen den anderen Roboter in Nichts nach. Alle waren in Python programmiert.
Lieber Herr Prof. D. Scheible (wie dich deine Schüler*innen titulierten), da kannst du auf deine Truppe stolz sein. Du hast ihnen einiges beigebracht. Technik macht eben Spaß.
Axel Nothardt







Institut für Geodäsie und Photogrammetrie
War man am Mittwoch nach den Faschingsferien, dem 01.03.2023 nachmittags noch an der Schule, so staunte man nicht schlecht!
Schüler auf dem Baugerüst? Drohnenflug im Schulhof? Menschen, die von der Gebäudefassade Bilder machen? Ja, das alles hatte man nicht geträumt, sondern richtig gesehen!
Die Schüler-Ingenieur-Akademie (SIA) war an diesem ersten von drei gemeinsamen Nachmittagen mit Wissenschaftlern aus dem Institut für Geodäsie und Photogrammetrie im hinteren Hof des WBG unterwegs. Fleißig wurden hier mit GoPro- und Spiegelreflexkameras sowie mit einer Drohne Aufnahmen von den Sandsteinreliefs unseres Schulgebäudes gemacht.
Das Ziel: Möglichst viele Aufnahmen der Baukunst am Schulgebäude aus unterschiedlichen Winkeln und von verschiedenen Standorten machen. Doch wozu eigentlich das?
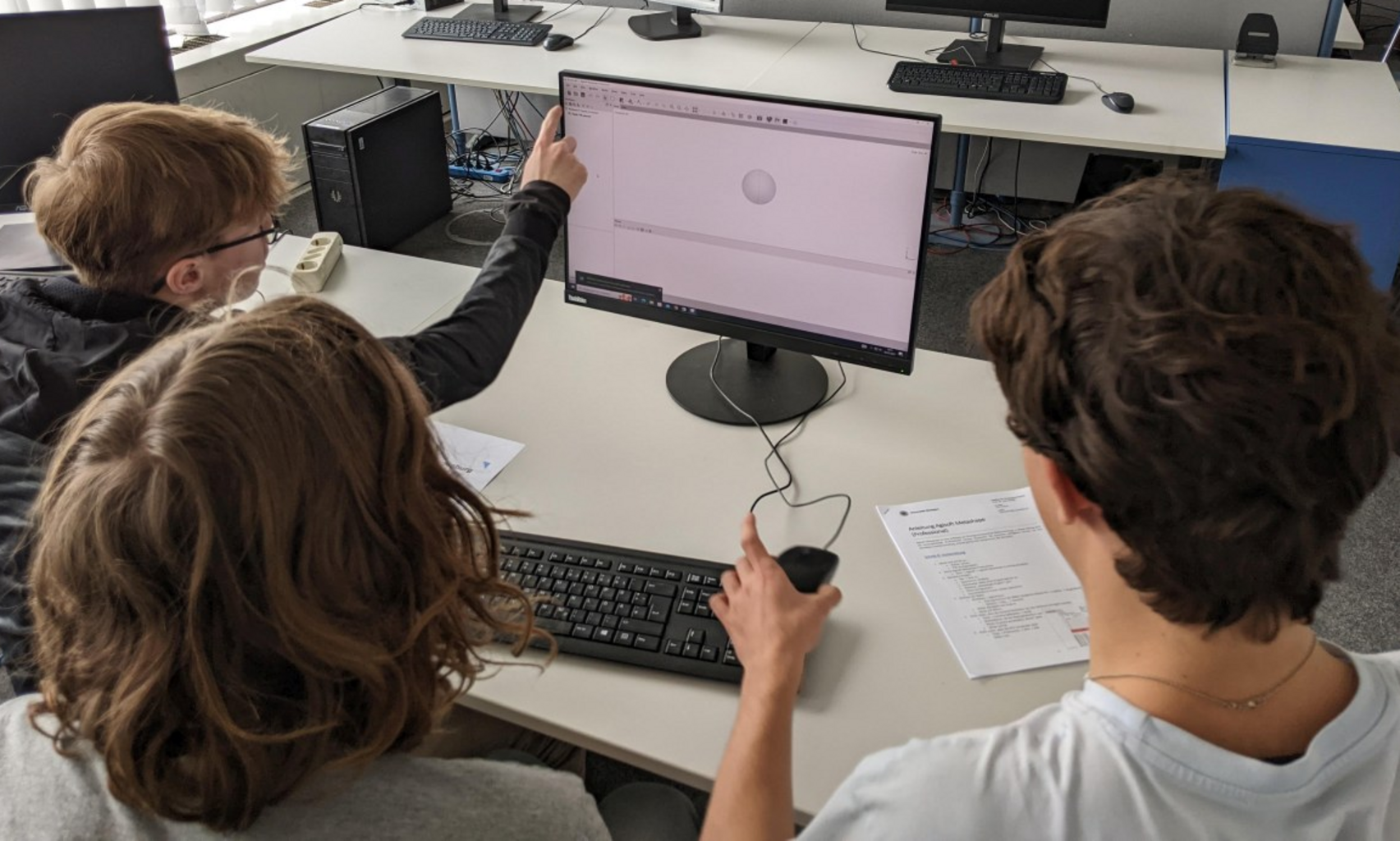
Die Geodäsie und auch die Photogrammetrie gehören zu den Ingenieurswissenschaften und bieten für Jeden und Jede, die sich für Technik, Physik, Mathematik aber auch Geographie interessieren, viele spannende Arbeitsfelder. Das aufzuzeigen, war mit dem durchgeführten Projekt nicht schwer! Denn gemeinsam mit den Wissenschaftlern erstellten die Schülerinnen und Schüler der SIA aus ihren Aufnahmen der Sandsteinfiguren in den beiden weiteren Terminen an der Universität digitale 3D-Modelle. Da werden sogar die Architekten, die gerade unser Schulgebäude sanieren, ganz neidisch!
Dazu wurden die gemachten Aufnahmen gesichtet und am Institut in einer Software am PC zusammengetragen. Anschließend konnte aus den Fotografien im Programm eine noch dünne 3D-Punktwolke des aufgenommenen Objekts generiert werden. Nachdem diese verdichtet und „gemesht“ wurde, entwickelte sich ein sehr gutes digitales Abbild unserer Reliefs. Diese konnten dankenswerterweise im 3D-Drucker des Instituts dann auch als Modelle ausgedruckt werden.
Zudem erfuhr der Kurs viele interessante Dinge rund um die Arbeit von Geodäten und was eigentlich Photogrammetrie ist. Dazu konnten nicht zuletzt am eigenen Körper 3D-Effekte in Bildern live im Klassenzimmer nachempfunden werden, sondern auch verschiedene Lasersysteme (z.B. für Vermessungen oder zur Erstellung von digitalen Raummodellen) kennengelernt werden. Herr Cramer vom Institut für Photogrammetrie rief sogar noch einen kleinen Wettbewerb aus, in dem die Schülerinnen und Schüler selbst gewählte Objekte als eigenständiges Projekt 3D-modellieren konnten. Die Ergebnisse hierbei konnten sich wirklich sehen lassen!
Die SIA 2023 dankt dem Institut für Photogrammetrie und dem Team um Prof. Sörgel, Prof. Haala, Lena Joachim, Philipp Schneider und insbesondere Dr. Michael Cramer für die tolle Vorbereitung, Durchführung und Betreuung!
David Scheible



SIA 2022/2023 beim RoboRace der Universität Stuttgart
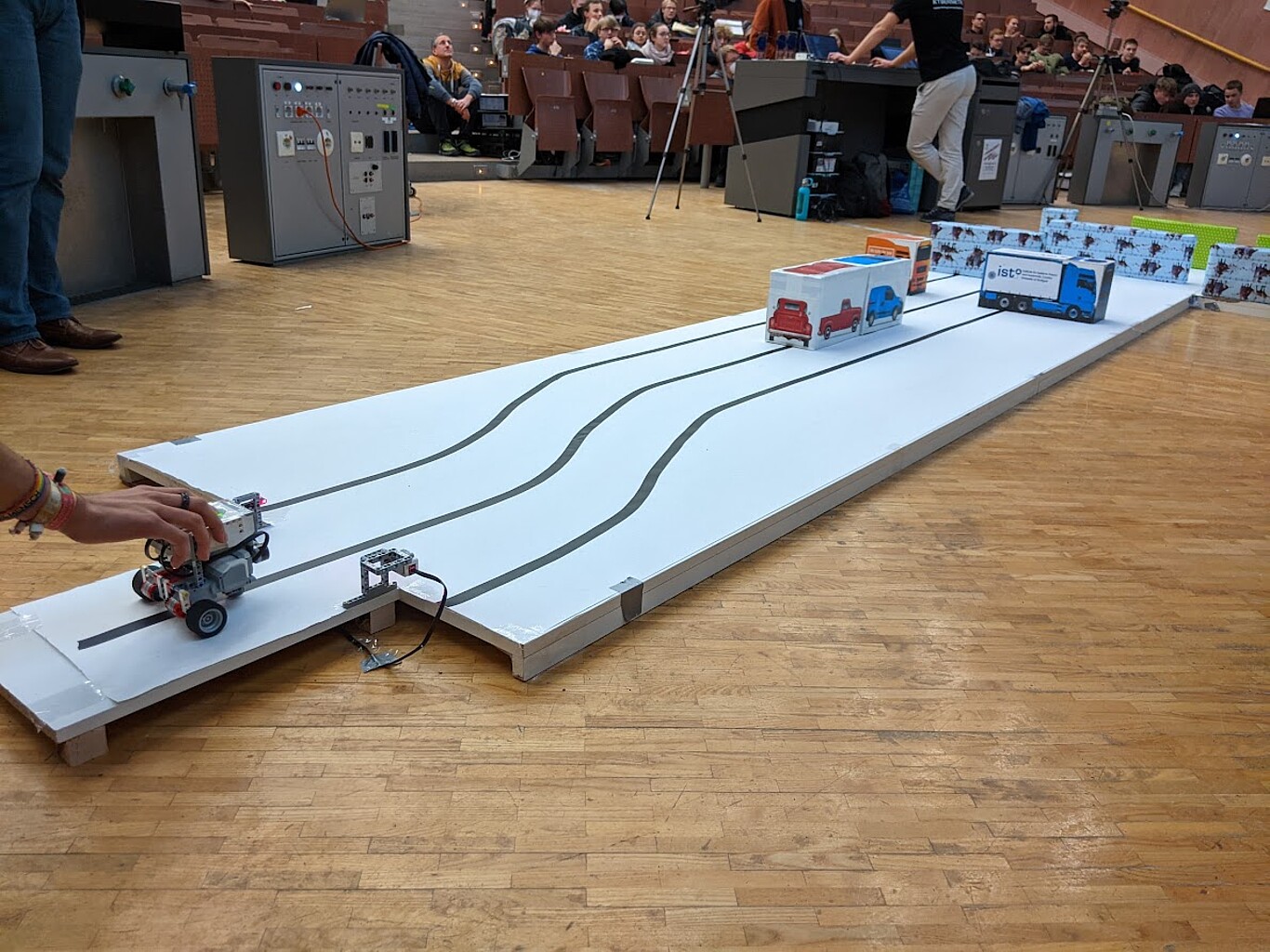
Auch in diesem Schuljahr trat die Schüler-Ingenieur-Akademie des WBG mit gleich drei Schüler*innen-Teams beim RoboRace 2022 des Instituts für Systemtheorie und Regelungstechnik an der Universität Stuttgart an, um den studentischen Teams gehörig Konkurrenz zu machen.
In der vom Institut gestellten Aufgabe hatte dieses Jahr alles mit dem Thema „autonomes Fahren“ zu tun. So sollten die Teams einen Roboter konstruieren und programmieren, der auf einer Hindernisstrecke mit gleich mehreren Fahrbahnen und selbstredend Hindernissen eigenständig letztere erkennt. Daraufhin sollte der Roboter selbstständig ausweichen und auf eine freie Fahrspur wechseln – ganz wie die autonomen Fahrassistenten und -systeme der echten Big Player in der Automobilbranche!
Dazu benötigen die Roboter Sensoren, um der Spur zu folgen sowie die Hindernisse orten zu können und müssen über die Programmierung eine Regelung erhalten.
Und die Motivation der Wagenburg-Teams war hoch: alle versuchten mit kreativ entwickelten Robotern und programmierten PID-Reglern an den Start zu gehen. Alle Teams meisterten die Qualifikationsrunde – fast immer sogar problemlos. In der Vorrunde wurde es dann knackig: Waren in der Qualifikation noch nur zwei Spuren festgelegt, kam nun die dritte Spur hinzu. Außerdem wies die Fahrbahn Kurven auf. Unser Team „Kehrwoche Engineering and Productions“ schaffte es mit einer hervorragenden Zeit ins Finale einzuziehen. Auch die anderen Teams schlugen sich beachtlich.
Im Finale am 16.12.2022 fuhr das Team KWEP eine sehr beachtliche Zeit auf dem Straßenkurs ein, konnte sich jedoch knapp nicht für die K.O.-Runde qualifizieren. Der erste Platz ging dieses Jahr an ein Studierenden-Team. Das WBG wird sich im kommenden Jahr mit der dann neuen SIA zurückmelden!
David Scheible



Roborace Winter 2021
Biathlon mit Legoroboter
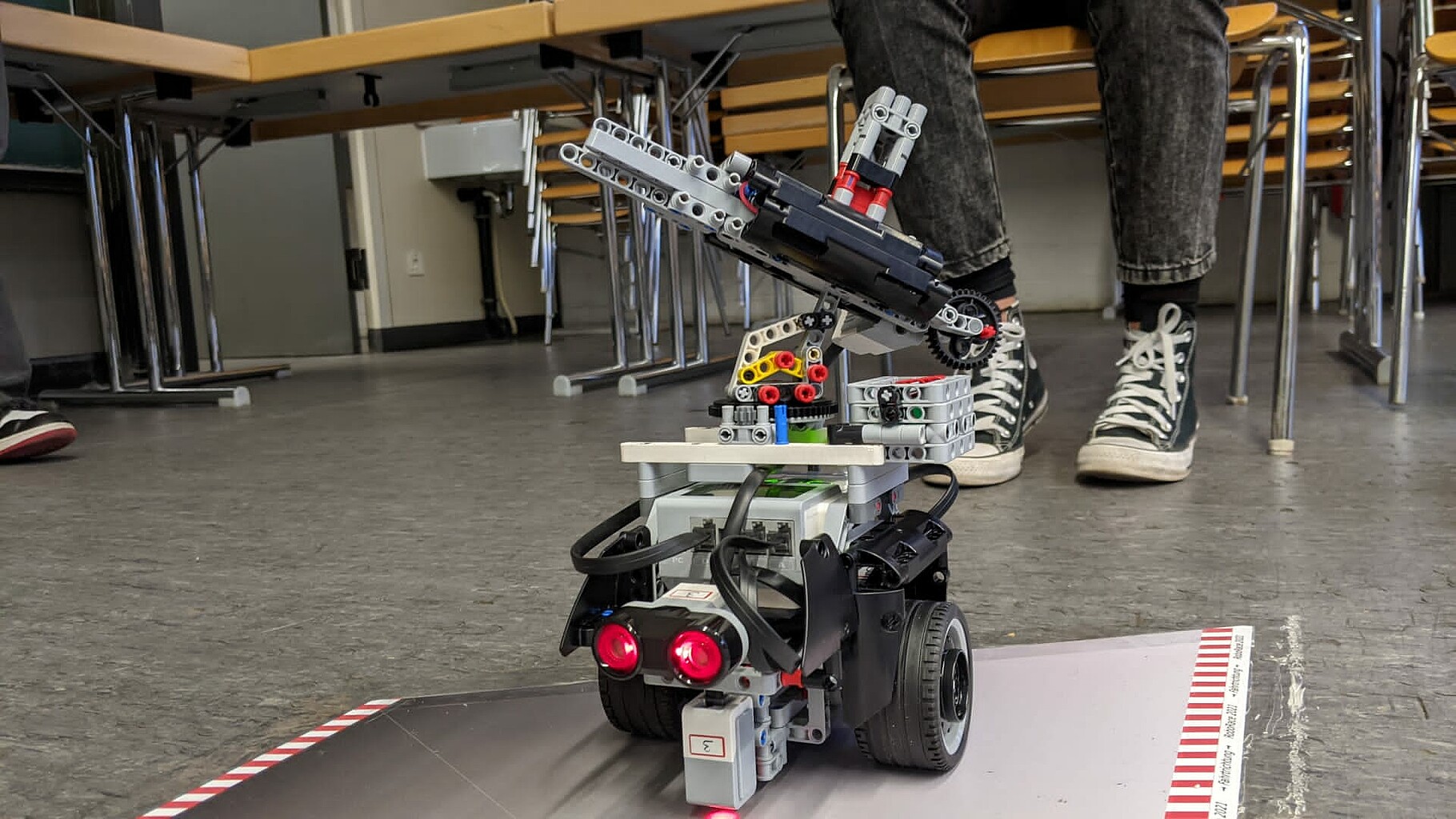
Mit 19 Schüler*innen hat der Seminarkurs Schüler*innen Ingenieur*innen-Akademie (SIA) eine noch nie dagewesene Stärke. David Scheible machte gleich klar, mit ihm gibt es keine halbe Sachen. Ohne PDI-Regler will er mit den Teams erst gar nicht bei dem Roborace-Wettweberb gegen andere Schulen und die Kybernetik-Student*innen der Uni Stuttgart gar nicht erst antreten. Bei der gestellten Aufgabe soll das Fahrzeug in der Mitte einer Straße fahren, die von links nach recht unterschiedliche Grauwerte hat. Kommt das Fahrzeug von der Mitte ab, regelt der PDI Regler auf drei Stufen, um möglichst gut wieder zurück in die Mitte zu Lenken. Je weiter die Abweichung von der Mitte desto stärker soll die Lenkung einschlagen. Hierfür sorgt die Proportionale Regelung (P). Um möglichst weich, harte Ausschläge abzufedern wird auch noch die Ableitung der Abweichung – Derivativ (D) - berücksichtigt. Systemische Fehler, die von den Bauteilen kommen, werden mit dem Integral (I) ausgeglichen. Bei dem Farbsensor der Mindstorm-Legoroboter der EV3 Serie ist die Qualität so gut, dass wir diesen Regelungsanteil nicht benötigten.
Die Kybernetiker hatten dieses Jahr die Aufgabe an einen Biathlon angelehnt. Die „Straße“ verlief mit Slalom. Am Ende wurde dann noch mit einer Kanone auf ein Ziel geschossen. Insgesamt 3 Mal reisten die Schüler*innen mit ihren Roboter an die Uni, um sich zu qualifizieren, die Vorrunde zu absolvieren und schließlich im Finale mit den anderen zu duellieren. Unsere 4 Teams hießen Wall-E, Speedboost-Bogdan, PAFI und Scheibles Legendentruppe.
Auch wenn unsere Teams leider knapp das Viertelfinale verpassten, kam wenigstens einer unsere Schüler mit dem folgenden Kommentar “Das ist eigentlich nicht schwer, wenn man sich einmal reingefunden hat. Aber wir hatten einfach nicht genug Zeit dafür.” in den Artikel von Jürgen Brandt (StZ). Die Teams hatten wirklich jede Freizeit in die Roboter investiert. Egal ob ich in einer Pause den Arbeitsraum betrat oder abends um 18 Uhr an der Schule war, wurde ich mit Fragen konfrontiert wie: „Wie ist das Übersetzungsverhältnis unseres Getriebes und wie sollte es von den Konstanten unserer Regler berücksichtigt werden“.
An der Stelle möchte ich jedoch dem Team Des Informatikkurses in der K2 vom Heidehof-Gymnasium gratulieren. Auch die beiden WBG Schüler Franz und Lyes waren an dem Gewinn beteiligt.
Axel Nothardt

Roborace Juni 2021
In SIA haben wir Schüler*innen über das Schuljahr hinweg verschiedene Roboter gebaut und programmiert. Unsere erste Aufgabe beispielsweise war es, einen Höhlenroboter zu konstruieren, der Höhlen selbstständig erforschen sollte. Nach der Fertigstellung des Höhlenroboters sollte anschließend jedes Team einen weiteren Roboter für das „Roborace“ entwerfen.
„Roborace“ ist ein Wettbewerb der Universität Stuttgart Vaihingen, an welchem mehrere Schüler-, sowie Studententeams teilnehmen. Die gestellte Aufgabe bestand darin, den eigenen Roboter so zu gestalten, dass dieser eine Strecke selbständig möglichst schnell durchfahren sollte. Zu Beginn hatten wir als Angaben über die Strecke nur, dass diese größtenteils schwarz-weiß verlaufend gefärbt sein würde und auf einer kürzeren Distanz keine Färbung, dafür aber eine Wand als Orientierung für den Roboter vorhanden sein würde.
Nach einer Bauzeit begannen die ersten Qualifikationsrunden, sowie Informationsveranstaltungen von der Uni, welche online stattfanden. Zum Halbfinale, in das es alle Teams unserer Schule geschafft hatten, fuhren wir dann erstmals gemeinsam vor Ort an die Hochschule. Auf der dort aufgebauten Strecke konnten wir dann unsere Roboter präsentieren, wobei von jedem Team jeweils zweimal die Zeit erfasst wurde, die der Roboter für zwei Runden der Hindernisstrecke brauchte.
Leider haben alle drei Teams unserer Schule den Einzug ins Finale nicht geschafft. Dennoch war der Besuch der Universität sehr spannend und auch, Corona bedingt, nach langer Zeit wieder einer der ersten gemeinsamen Exkursion für viele von uns.
Wir möchten uns bei Herrn Bernhard bedanken, dass er uns die Teilnahme am Wettbewerb ermöglicht hat und für die Unterstützung während des Sia-Kurses.
Laura Breil, Alice Vollmer (K1)













